2022中国低速无人驾驶场景生态共建拓展大会已于昨天闭幕,大会汇集了低速无人驾驶产业诸多企业,共享行业前沿动态及技术方案。
作为低速无人车上的“眼睛”,激光雷达以其不可或缺的功能,成为应用企业关注的焦点。
会场上,镭神智能提前曝光了1550nm雷达新品——图像级光纤车规激光雷达和更新迭代的多线机械式激光雷达。展示最新感知技术。
而作为激光雷达及整体解决方案提供商,镭神智能聚焦低速场景解决方案,以激光雷达3D SLAM自主导航系统、多传感器融合环境感知解决方案及车路协同路侧感知系统,诠释3D 激光雷达如何赋能港口、矿区、环卫、末端配送、无人接驳等无人驾驶场景的应用。

演讲主题:3D激光雷达赋能低速无人驾驶生态应用

镭神智能助理总经理 杨品桂
1
激光雷达3D SLAM自主导航系统
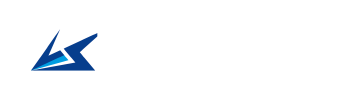
激光雷达3D SLAM自主导航系统以多线激光雷达为主传感器,对车辆工作的区域环境进行扫描探测,利用先进的3D SLAM算法进行场景3D地图的构建,同时结合SLAM匹配定位及低速无人车里程计、IMU实现多传感器融合高精度定位,生成全局最优路径规划和航迹跟踪控制。
即使在信号衰减的情况下,也能保持车辆的精准定位和路径运行。
系统集成传感硬件和算法,可为用户提供从硬件到整体方案的定制化服务。因为镭神智能激光雷达具有小型化的特点,无论是工业机器人还是非工业机器人,均适用于内嵌或外置。
当前,激光雷达3D SLAM自主导航系统已应用在清扫机器人、配送机器人、无人叉车、AGV等产品和场景。
2
多传感器融合环境感知解决方案
相比于激光雷达3D SLAM自主导航系统,多传感器融合环境感知解决方案则更适用于更加复杂的道路运行环境。
而更复杂的道路环境,除了行人、车辆、标线、障碍物等因素以外,还有天气的变化。这对无人驾驶车感知系统的灵敏度,无疑需要更高的要求。
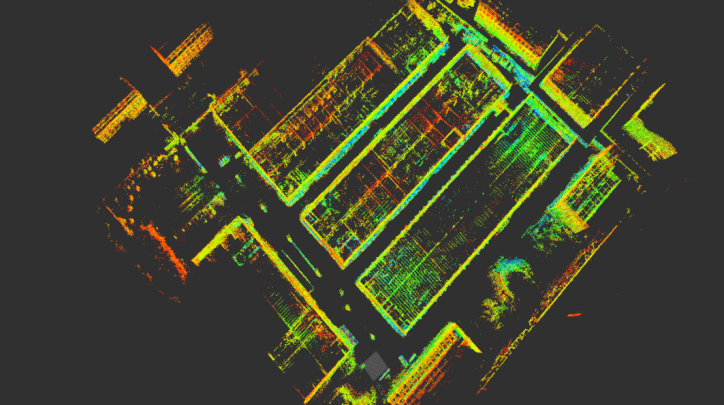
镭神智能多传感器融合感知系统,集激光雷达、毫米波雷达、摄像头于一体,实现多传感器功能的互补,进而协同获取更全面的环境信息,确保无人驾驶的安全冗余性。
激光雷达+视觉融合路测效果
有了多传感器的融合数据之后,系统另外的神经网络算法,有着领先的深度学习能力,可精准识别目标属性,即时输出车周环境信息(包括车道线与路标识别、车辆与行人的坐标、轮廓大小、速度、距离等),帮助车辆的智驾反应。
该解决方案目前也陆续赋能无人驾驶车的落地应用,包括东风悦享的无人接驳巴士“春笋号”:在武汉小军山地铁站与车都青年城之间进行示范运营,提供全天候短途无人接驳服务;还有五菱的无人驾驶观光车在浙江、武汉、柳州多地交付使用等。
无人驾驶应用案例





3
车路协同路侧感知系统
以上两种方案是让单车智能化,但放眼道路运行更全局的安全性,车路协同路侧感知系统,是从“上帝视角”为无人驾驶提供整体道路环境,弥补单车视觉盲区感知的不足。
车路协同路侧感知系统,将路面信息包括来往行人、物体全部纳入V2X的数据网络中,再通过交通控制中心服务器向周边或者更远距离的车辆进行广播,同时为车辆提供路口通行信息及交通安全信息提示,包括红灯提醒、驾驶速度提醒、盲区提醒等。可更加保障单车自动驾驶的安全性。

在自动驾驶愈加发展的今天,打造更可靠的自动驾驶实施场景,建设路侧数字化建设具有重要意义。为了保障自动驾驶的安全性,”单车智能“和”道路智能“双轨运行发展,具有重要的战略意义。
而对此,镭神智能不仅拥有车端的整体解决方案,也有路端应用方案,并实现了车端与路端的数据连通。
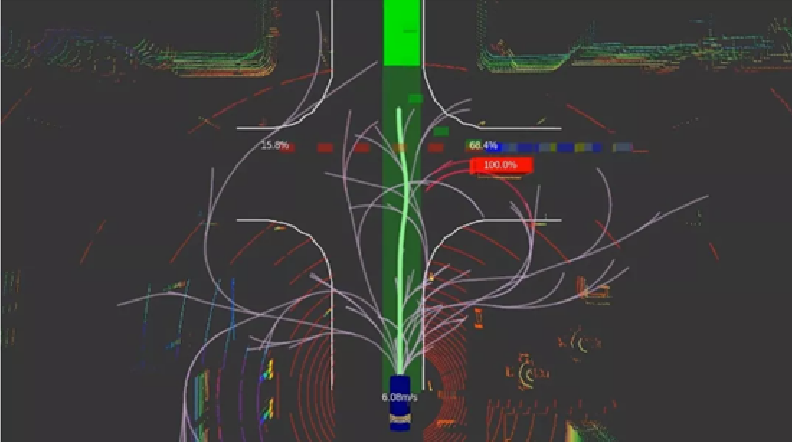
镭神智能深圳工厂园区应用
随着激光雷达应用方案的不断融合与升级,镭神智能对于赋能低速无人驾驶的更进一步发展,也充满着信心,而这也和大会上演讲的主题相呼应,”3D激光雷达赋能低速无人驾驶生态应用“不仅是已有的方案,更是已实践过的能力证明。










